
近两年,身边越来越多的朋友都对带有高级辅助驾驶功能的车“心向往之”,由此可见,高级辅助驾驶和自动驾驶已不仅仅是从业人员感兴趣的专业领域,而在不久的将来则将很快成为大众购车的重要决策性因素。
为此,弗卡斯专门为大家开设了〖自动驾驶专题〗,将会定期与大家分享自动驾驶领域的专业知识,欢迎业内的技术大佬们前来交流,共同探讨自动驾驶的那些事儿。

什么是自动驾驶?
什么是自动驾驶车辆?
自动驾驶车辆有什么独特之处?
自动驾驶车辆是由什么组成的?
……
▲感谢各位网友的积极发问,接下来且听弗卡斯为您一一解答
什么是自动驾驶?
自动驾驶又称为无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。也就是说,在驾乘人员驾驶该车辆时,即便驾驶者不去操控汽车,该车也可以根据既定的路线安全到达目的地。
自动驾驶分为几个级别?
为了更好地区分不同层级的自动驾驶技术,国际自动机工程师学会(SAE International)于2014年发布了自动驾驶的六级分类体系。
目前的自动驾驶技术主要是参考SAE的标准按照驾驶能力的高低进行分级,主要分为非自动化(L0)、辅助驾驶(L1)、部分自动化(L2)、有条件自动化(L3)、高度自动化(L4)和完全自动化(L5)。👇


(图片来源:百度AI社区)
在这里需要注意的是,按照SAE的分级标准,第2级技术和第3级技术之间,存在相当大的跨度。当然,即便按照SAE标准实现了第3级的自动驾驶,根据这个级别的定义,人类驾驶员也必须随时待命,准备响应系统请求,处理那些系统没有能力应对的特殊情况。所以,虽然从技术标准上说,第3级自动驾驶有它存在的必要,但在实际应用场景里,这一级别的自动驾驶是否真正可用,是很值得我们怀疑的。
自动驾驶车辆的组成?
无人驾驶车由车、线控系统、传感器、计算单元等组成,如图所示。车作为无人驾驶的载体,是无人驾驶车最基础的组成部分。
除了车本身之外,还需要车上安装有线控系统。有别于传统汽车通过机械传动的方式控制汽车,线控系统通过电信号来控制汽车,这种方式显然更适合电脑控制。👇

(图片来源:”汽车电子与软件“公众号)
无人驾驶车还配备了数目众多的传感器,包括激光雷达、摄相机、毫米波雷达、超声波雷达、GPS、IMU等。传感器是无人驾驶车的眼睛,负责感受外部环境。计算单元则是无人驾驶车的大脑,传感器获取的信息经过计算单元的计算之后,输出一条可以供汽车安全行驶的轨迹,控制汽车行驶。
为了方便感知周围的环境,无人驾驶车用到了各种各样的传感器,这些传感器从功能上划分为2类:环境感知和状态感知。
环境感知主要是获取车当前所处的环境信息,包括:周围的车辆、行人、交通标志、红绿灯、所处的场景(路口交汇处、停车场、高速公路)等。
状态感知主要是获取车自身的状态,包括当前车辆的位置、航向角、速度、俯仰角等信息。
无人驾驶车所用到的传感器如下图所示,包括激光雷达、毫米波雷达、超声波雷达、相机、GPS、IMU等。下面开始分别介绍这几种传感器。
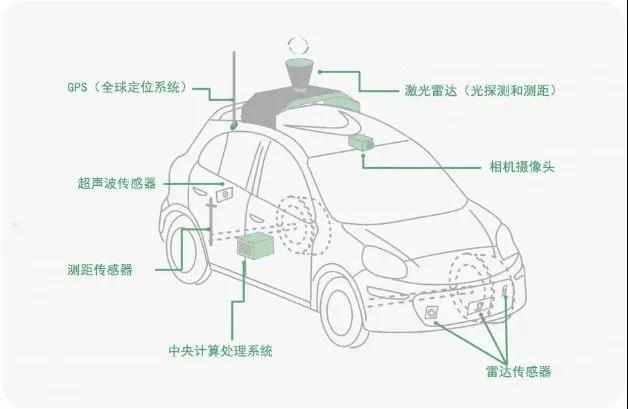
(图片来源:”汽车电子与软件“公众号)
激光雷达 LiDAR
虽然特斯拉的CEO伊隆·马斯克曾经说了一句颇具争议的话:
“只有傻瓜才用激光雷达。
(Lidar is a fool. Anyone relying on lidar is doomed)”
但出于安全性的考虑,激光雷达仍然是无人驾驶车的首选。
激光雷达LiDAR( Light Detection and Ranging)是光检测和测距的缩写,通过对外发射激光脉冲来进行物体检测和测距。激光雷达采用飞行时间(Time of Flight,TOF)测距,包括激光器和接收器。激光器先发送一束激光,遇到障碍物后反射回来,由接收器接收,最后激光雷达通过计算激光发送和接收的时间差,得到目标和自己的相对距离。
如果采用多束激光并且360度旋转扫描,就可以得到整个环境的三维信息。激光雷达扫描出来的是一系列的点,因此激光雷达扫描出来的结果也叫“激光点云Point Cloud”,如下图所示。

毫米波雷达 RADAR
毫米波雷达(RADAR)和激光雷达的原理类似,毫米波雷达通过发射和接收电磁波来检测物体的距离和速度。目前已经上市的高级驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)大部分都带有毫米波雷达。
原理:毫米波雷达的原理是通过发射电磁波,然后接收反射回来的信号,通过电磁波返回的时间差计算目标的相对距离,通过多普勒效应产生的频率偏移来计算目标的相对速度。
雷达按照测量的距离划分为短距离雷达和长距离雷达。
· 短距离雷达:探测的范围比较大,但是探测的距离比较短。
· 长距离雷达:探测的范围比较窄,但是探测的距离比较长。
超声波雷达 Ultrasonic Radar
超声波雷达(Ultrasonic Radar)通过发射超声波计算障碍物的距离,对温度敏感,测量精度大概是1-3cm。同时超声波雷达探测的距离非常短,最远探测距离不到3m,只能在短距离测距的时候使用。
目前超声波雷达主要应用在自动泊车中,宝马和大众的自动泊车系统都搭载了数枚超声波雷达来检测停车库位。
超声波雷达有2种应用方式:一种称为UPA,用来探测汽车前后的障碍物;另一种称为APA,安装在汽车侧方,用于探测汽车侧方的障碍物。
相机/摄像头 Camera
相机(Camera)是目前无人驾驶中应用和研究最广泛的传感器。基于图像的物体检测和识别技术已经相当成熟,近几年,基于深度学习 Deep Learning的视觉感知算法甚至已经超过了人类的水平。无人驾驶车上一般会安装多个相机,兼顾不同的视角和任务。
相机的成本低、成像像素高、刷新频率快,因此相机被大量应用于车辆,行人和车道线检测;相机还可以获取颜色信息,用来做红绿灯检测和交通标志识别;相机拍摄的图片经过场景分割用来做场景理解和路面识别。可以说相机应用在无人驾驶环境感知的方方面面。
分类:
按照使用到的相机个数,分为单目相机和双目相机。
a. 单目相机。单目相机由1个相机组成,结构简单,成本低,但是无法测量准确的距离。
b. 双目相机。双目相机由2个相机组成,由于2个相机之间的距离已知,可以估算出空间距离,但是标定和计算量比单目相机大。
按照相机的焦距,分为长焦相机和短焦相机。
a. 长焦相机。长焦相机看的距离远,在拍摄远处的景象的时候更加清晰。在无人驾驶车中,长焦相机用来发现远处的交通状况和红绿灯识别。
b. 短焦相机。短焦相机主要用来发现近处的物体,视野范围比长焦宽。障碍物识别、车道线检测和场景分割等多个任务都需要用到短焦相机,往往车上会集成多个短焦相机,覆盖整个车的视野范围。
按照类型划分,除了最常见的相机之外,还有事件相机、全景相机、深度相机和红外相机4种新型相机。
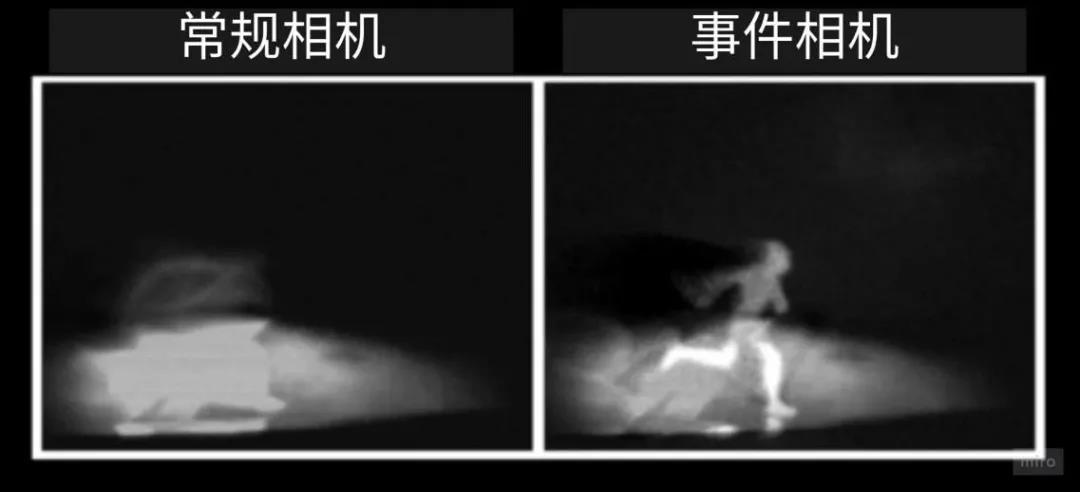
· 事件相机(Event Camera):事件相机中的每个像素独立响应亮度的变化,通过捕捉亮度变化成像,因此对运动物体捕捉效果非常好,并且不受曝光时间限制,成像速度非常快。普通相机在高速运动状态下会出现运动模糊,而事件相机则很好的解决了这个问题。目前事件相机的主要限制是像素大小和图像分辨率,例如DAVIS240型号的事件相机像素大小只有18.5x18.5µm,分辨率为240x180。如下图所示,分别是普通相机和事件相机拍摄到晚上有行人在汽车前奔跑的画面,可以看到普通相机出现了明显的曝光不足和运动模糊,而事件相机则很清晰。
全景相机(Omnidirectional Camera) :全景相机有360°的采集视野,解决了单个相机视野范围不足的问题。全景相机通过2枚或者4枚鱼眼镜头进行拍摄,然后把拍摄好的照片拼接起来,组成全景照片。全景照片技术已经非常成熟,已经应用在VR看房等场景,对导航,定位和地图制图都很有帮助。如下图所示全景照片的边缘畸变非常严重,需要算法处理之后才能正常显示。

深度相机(Range Camera):深度相机能够获取环境的深度和颜色信息,目前有3种深度测距方法:结构光测距、飞行时间法和双目视觉测距。深度相机能够探测的距离非常有限,因此主要还是应用在室内场景的三维重建,如下图所示。
红外相机(Infrared Camera):红外相机通过热成像原理对物体进行检测,目前在无人驾驶中还没有大规模应用。

GNSS & IMU
GNSS(Global Navigation Satelite System)是全球卫星定位系统的简称,终端通过接收至少4颗卫星信号,就能迅速确定自己的经纬度和海拔高度,精度可以达到10米左右,是目前使用最广泛的定位手段。IMU(Inertial Measurement Unit)是惯性测量单元的简称,IMU安装有三轴的陀螺仪和三个方向的加速度计,用来测量物体三轴姿态角以及加速度,一般而言要安装在无人驾驶车的重心上。GNSS和IMU通常结合起来,用来获取无人驾驶车的位置和姿态。
如果说传感器是无人驾驶车的眼睛,那么计算单元则是无人驾驶车的大脑,传感器采集到的数据经过计算单元的运算,最后才能转化为控制信号,控制汽车的行驶。因此一个性能强劲的大脑显得尤为关键。
无人驾驶车运行过程中需要处理各种不同类型的任务,所以目前大部分的无人驾驶计算平台都采用了异构平台的设计。无人驾驶车在CPU上运行操作系统和处理通用计算任务,在GPU上运行深度模型感知任务。
无人驾驶操作系统运行在CPU上,实现系统调度、进程管理、网络通信等基本功能。还有一部分通用任务也跑在CPU上,例如定位的NDT算法、卡尔曼滤波和控制相关的算法等。无人驾驶的环境感知算法运行在GPU上,目前主流的深度学习框架都支持通过GPU来加速运算,特别是一些图像算法。GPU的性能和无人驾驶车感知周围环境的能力息息相关,目前也有采用专门用于深度学习的芯片来处理此类任务,例如google的TPU等。
(部分图片及资料来源:百度AI社区、知乎、”汽车电子与软件“公众号)


